
Douglas Hu



In a WigWag sponsored project, I led a team of 4 graduate students to prototype an off-the-shelf solution to autonomous indoor localization and mapping. Click the image below to see a time-lapse demo of the system in action:

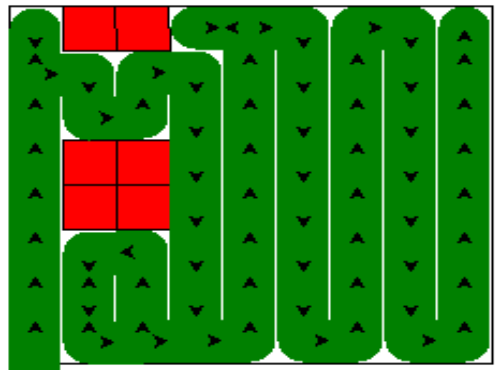
The system creates a map of the room real-time. Below is screenshot of the map in creates of the room in the previous video.
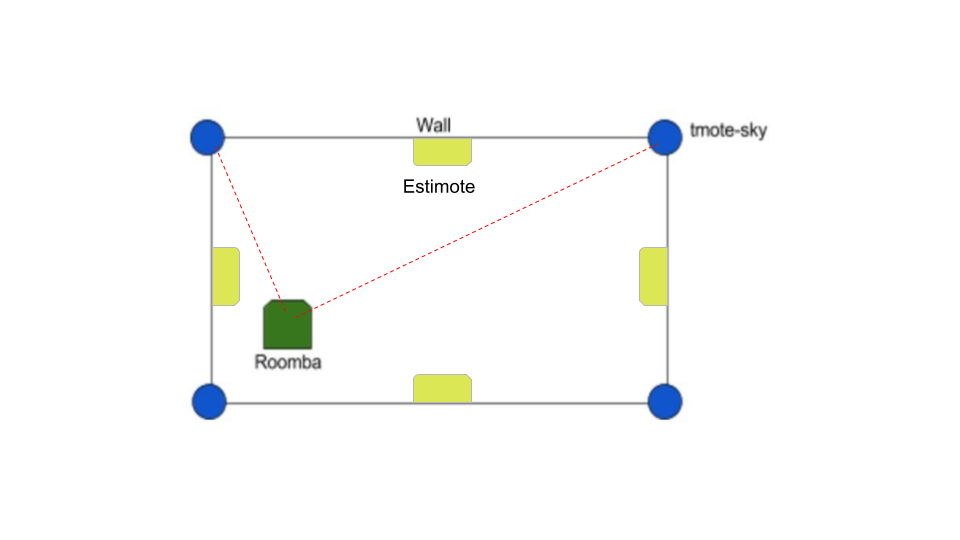
The system used a combination of low power wireless sensor networks and a Roomba to navigate an indoor floor layout and map obstacles in the room. Estimote bluetooth beacons are a commercially available solution for indoor localization. Tmote Sky devices are commonly used in academia to prototype indoor localization using RSSI fingerprinting.

The wireless sensor networks use triangulation to estimate the location of the Roomba in the room.
To see a comparison of the different triangulation methods and details on the system design and implementation, check out our website.
For the source code: